Menuett by byte
digitale Bändigung überbordender Freiheitsgrade
Wenn es ums Finden der endgültigen Form von Dingen geht, ziehe ich Arbeiten mit
physische Prototypen jeglicher Simulation auf dem Computer-Display vor. Im folgenden
Fall fand ich eine Ausnahme gerechtfertigt.
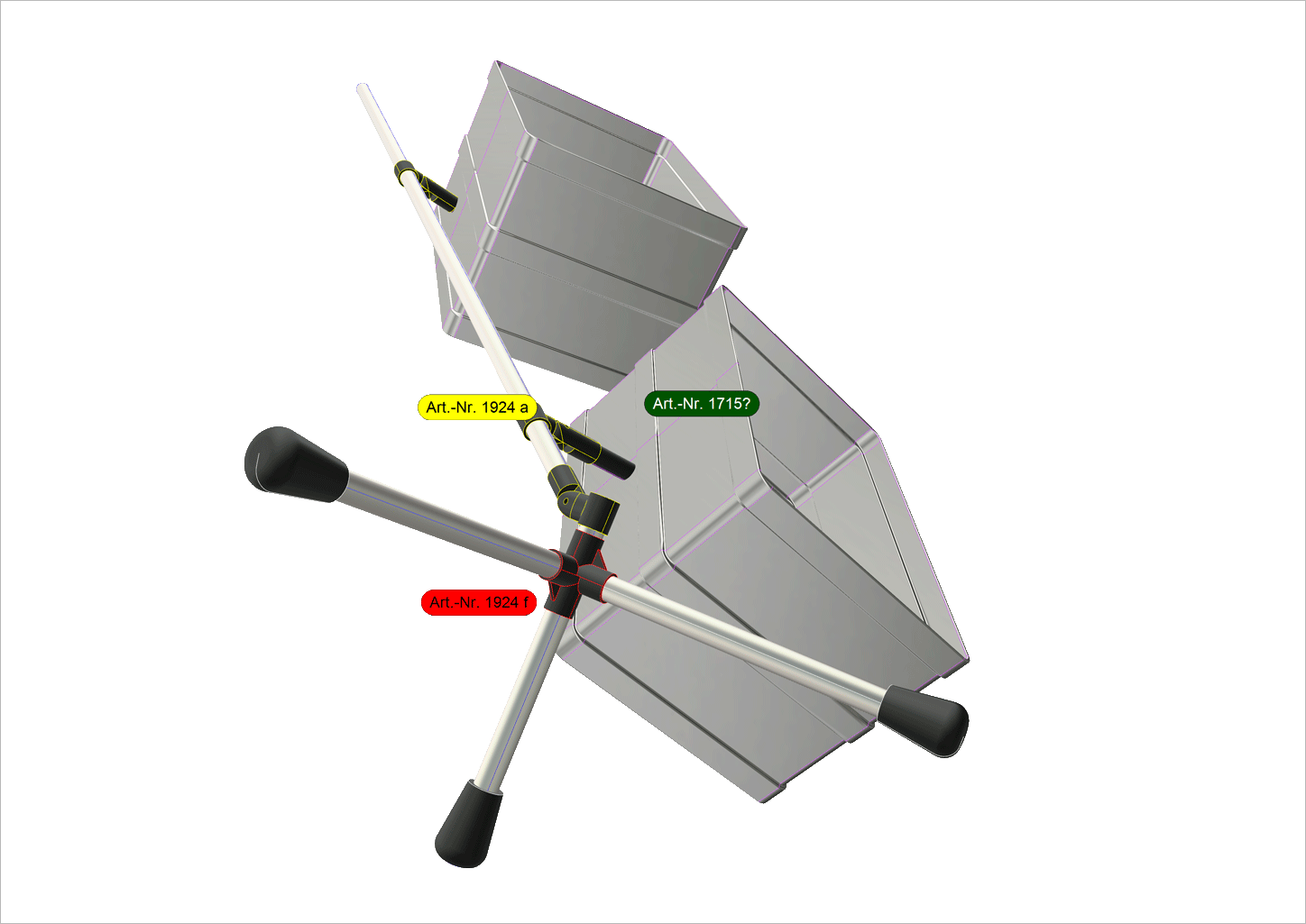
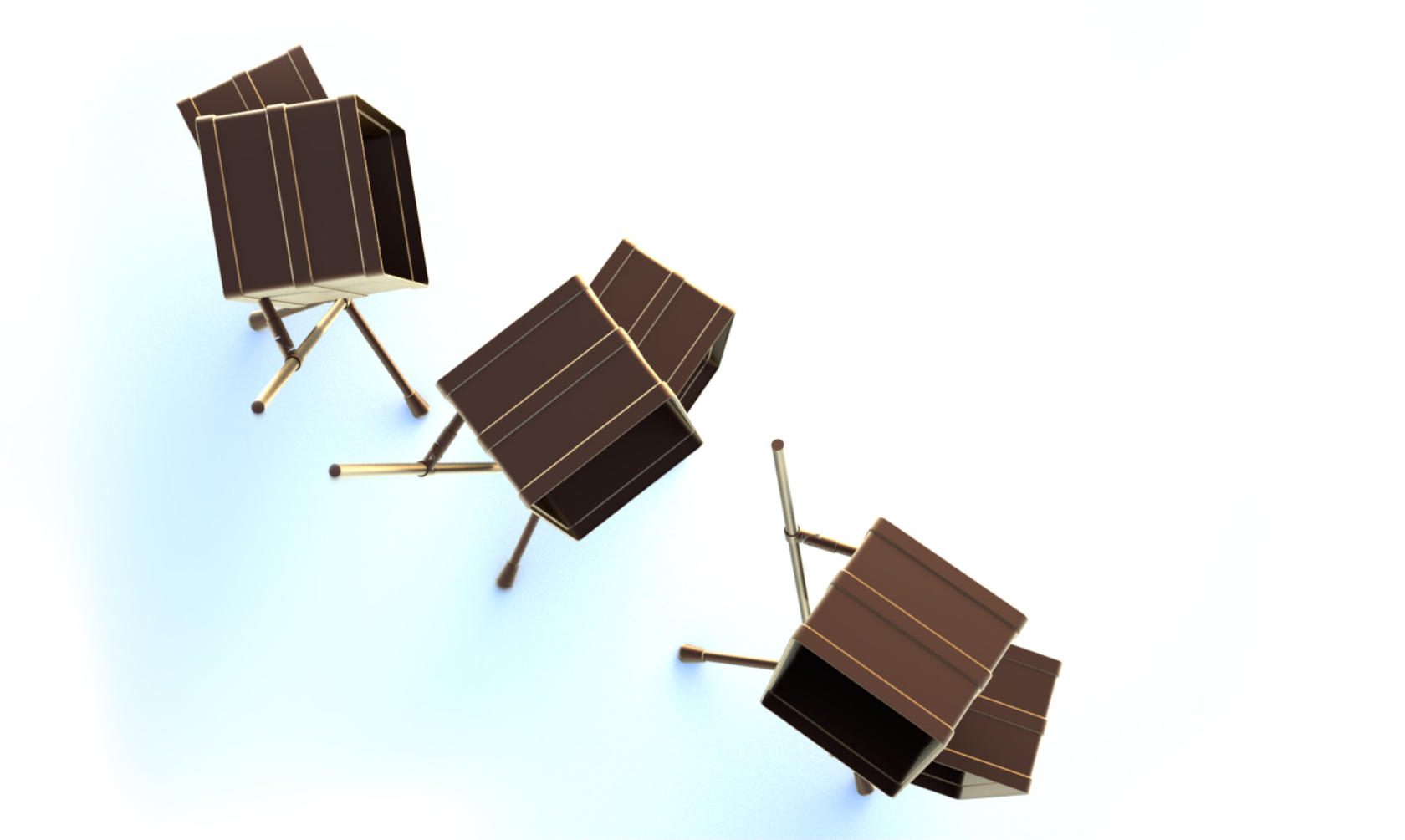
Die tanzenden Schuhcontainer für Hacke & Spitze verdanken ihre beschwingte Form
jeweils 8 verschiedenartigen Rohrverbindern. Jedes neu hinzugefügte Gelenk führte
weitere 2-3 freie Bewegungsachsen (Freiheitsgrade) ein. Zudem waren sämtliche
Rohrlängen und Element-Abstände prinzipiell frei wählbar.
Diese Freiheit wurde jedoch durch allerlei Zwangsbedingungen beschnitten.
Die Behältermöbel sollten zur Präsentation dienen. Sie durften klein gewachsene Damen
nicht überragen, auch die Oberkanten auf denen die Schuhe stehen durften nicht
übermäßig schräg ausfallen. Der mit Schuhkartons gefüllte Stauraum mußte natürlich
ungehindert zugänglich sein, der Nachschub sollte aber auch nicht von selbst hinausfallen.
Darüber hinaus – und dies war die entscheidendste Anforderung - sollte das dynamische
Arrangement auch bei voller Beladung sicher stehen.
In Anbetracht namentlicher Constraints einerseits und der Vorahnung, einer furchtbaren
Fummelei mit zahllosen Stellschrauben und ohne jegliche Konstante im Raum fiel die
Wahl auf eine programmatische Lösung. In Grasshopper3D baute ich eine inverse
Kinematik, die per Schieberegler (und attraktiverweise von jeder Schwerkraft befreit) das
Posen der Figuren erlaubte. Überdies konnte in jeder Lage der Schwerpunkt ausgelesen
werden. Die eigenlichen Bauteile wurden mit Schablonen markiert und konnten
anschließend in Serie gefertigt werden.
minuet by byte
digital taming of exuberant degrees of freedom
When working on the final shape of objects, I by far prefer working with physical
prototypes over computer simulations. In this case, an exception from the rule seemed
acceptable.
The 'dancing' shoe containers designed for the Hacke & Spitze shop owe their
swingin' gait to eight tube joints each. With each further hinge however two or three
additional rotational axes (degrees of freedom) came into play. All tube lenghts as well as
the distances of container elements could be varied ad libitum.
But then, these liberties were limited by a number of constraints: The containers were
meant to function as presentation devices. They must not tower over petite ladies. Their
top surfaces should not be excessively tilted in order to allow the presentation of shoe
models. The storage space beneath should be easily accessible and of course boxes are not
supposed to slip out. The most important demand however was that the dynamic
composition should stand securely even when carrying their full load.
All these restrictions, enriched by the apprehension of endlessly fidgeting in thin air with
lots of sticks and countless adjustment screws let me opt for a programmatic solution.
Using Grasshopper3D, I built an inverse kinematics scheme that would allow for the
posing the creatures, simply by using sliders.
Not having to deal with all manifestations of gravity proved priceless, further I was able to
monitor the center of mass at any point in time. Physical parts were eventually marked
with the help of stencils, derived from the Grasshopper definition.